电 话:13919318118
邮 箱:1214656522@@qq.com
网 址:www.yaohange.cn
地 址:甘肃省兰州市七里河区西津西路239号机电物流中心86-128号
焊接是一项工作中艰苦环境、劳动效率大、对实际操作工作人员的实际操作掌握情况要求高,且对实际操作工作人员会造成一定潜在性伤害的技术工种。在进到二十一世纪20年代的今日,伴随着中国经济经营规模的迅速发展趋势、老百姓生活水平的持续提高,另外因为在我国人口老龄化持续加重,一线焊接职工的总数展现降低发展趋势。而依据中国统计局发布的在我国焊材的生产量数据信息,从2006—二零一四年,在我国焊接材料生产量在逐渐提升,这代表着焊接工作量在逐渐提升。

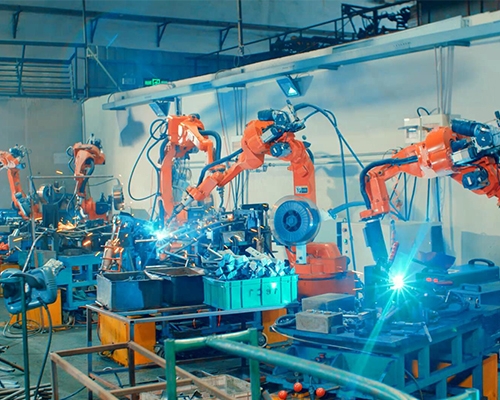
焊接机器人的出現合理解决了这类供求矛盾,而且能够使大量人把比较有限的上班时间资金投入到更具有想像力的工作上去[1]。另外,焊接机器人的应用能够大幅度提高焊接生产率,改进实际操作工作人员的劳动者标准,平稳和确保产品品质,便于完成商品的多元化生产制造,并可以促进有关产业链的自动化技术升級更新改造。
焊接机器人就是指机器人代替手工作业,即运用焊接机器人系统软件进行焊接工作,得到达标焊接件的全过程,依照机器人常用焊接方法方式不一样,可将其分成焊接机器人、弧焊机器人、搅拌摩擦焊机器人及激光焊接机器人等种类;依据自动化控制发展趋势水平的不一样,焊接机器人可分成步态分析重现型机器人、全智能机器人等;机器人在焊接行业获得了普遍的运用,据调查约25%的工业机械手用以焊接实际操作[4]。焊接机器人具备众多优势,包含焊接可靠性高、性价比高;可提升劳动效率;改进了劳动者标准,可在危害自然环境下工作中;减少了职工的技术实际操作水准和劳动效率;

确保焊接品质的前提条件下减少产品成本;柔性生产水平高,可完成小批量生产商品的焊接自动化技术;可在各种各样極限标准下进行焊接工作。焊接机器人大概可分成三个环节:提前准备、焊接和焊后检验。提前准备环节关键开展产品工件的安装及其机器人的步态分析程序编写,现阶段常见的步态分析程序编写又可依照人力和全自动、线上与线下两大类。人力可视化编程方式简易、低成本,但用时多,另外取决于电焊工的专业技能。全自动线下程序编写是现阶段认知度较高的先进技术,其特性取决于软性高、能够造成繁杂运动轨迹、比人力可视化编程速度更快。在焊接全过程中通常选用焊接全自动追踪技术来赔偿步态分析中很有可能出現的偏差,确保焊机与焊接的对中。
 甘公网安备 62010302000949号 服务支持:企源科技
甘公网安备 62010302000949号 服务支持:企源科技