电 话:13919318118
邮 箱:1214656522@@qq.com
网 址:www.yaohange.cn
地 址:甘肃省兰州市七里河区西津西路239号机电物流中心86-128号
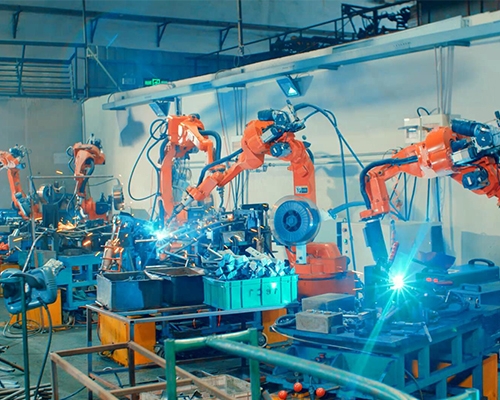
焊接机器人是集机械、计算机、电子、传感器、人工智能等多方面知识于一体的自动高端装备。焊接机器人主要由机器人本体和自动焊接设备两大部分组成。

1.焊接机器人的主要优点如下:
①稳定提高焊接质量,保证其均匀性
②提高生产率,机器人可焊接24小时
③改善劳动条件,可在有害环境下继续工作
④可实现中、小批量焊接自动化。
基于上述优点,焊接机器人在汽车制造和部件领域越来越广泛应用。现在广泛使用的焊接机器人都是第1代工业机器人,其基本工作原理是教学再现。示教也称为引导,既有用户引导机器人,一步一步地按照实际任务操作,机器人在引导过程中自动记忆示教的各动作位置、姿势、运动参数、技术参数等,自动生成连续执行所有操作的程序。完成示教后,只要给机器人发出启动命令,机器人就会正确按照示教的动作,逐步完成操作。
2、焊接机器人、焊接位移机和焊接夹具对焊接生产的影响。
①焊接机器人对零件定位精度要求高,同时焊接相对位置精度高。
②焊接机器人对焊接夹具前后工序的定位必须一致。
③工件由多个简单部件组成焊接,这些部件的组装和定位焊接按焊接夹具的顺序进行,因此定位和夹具单独进行。
④焊接位移机翻转的位移角度大,焊接夹具应尽量避免使用活动的手动销。
⑤焊接夹具应尽量采用快速紧固件,并配置带孔平台。
3、焊丝对焊接机器人焊接过程的影响。
焊接开始前,焊接机器人根据需要选择桶装或盘装焊丝。为了降低更换焊丝的频率,建议直接选择桶焊丝。但是,桶装焊丝所需的送丝软管长,阻力大,对焊丝的挺度等质量要求高。同时,尽量不要选择镀铜质量差的焊丝。否则,焊丝表面的镀铜会因摩擦而脱落,导管内容积减少,高速送丝时阻力增大,焊丝不能平滑送出,产生振动,电弧不稳定,影响焊接质量。

那么,对此也有一些改进措施,首先要严格控制工件组装部件,中小批量工件必须有专用组装部件,保证工件组装尺寸的一致性和焊接程序的通用型。其次,保证焊接工具夹具的定位夹持作业,360°翻转时的任何位置都可以焊接,焊枪在任何焊接位置都不能与工具干涉,工件的定位、夹持可靠,拆装方便的工具精度必须提供焊接机器人的焊接要求。
 甘公网安备 62010302000949号 服务支持:企源科技
甘公网安备 62010302000949号 服务支持:企源科技